技術の核心
スイッチングフォトリフレクタ
1.フォトリフレクタと能動型センサー
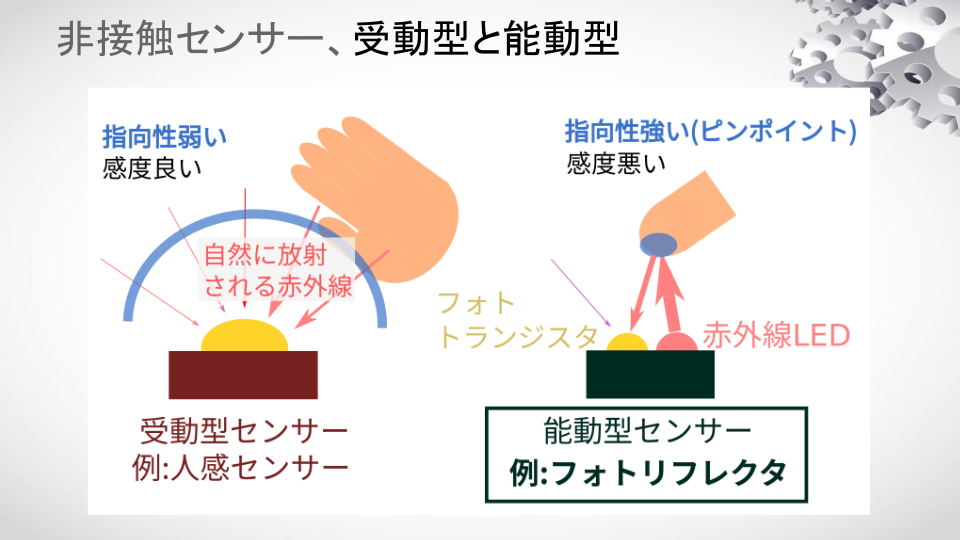
スイッチングフォトリフレクタに使うフォトリフレクタのお話です。非接触センサーには光(音)を測定するだけの「受動型センサ」と光を放射して反射光を測定する「能動型センサ」があります。フォトリフレクタは図右の能動型センサで赤外線を放射して反射光を測定します。光を放射した場所の反射光を検出することでピンポイントで物体の検出ができます。従来の受動型センサーではピンポイント検出が難しいので今までは非接触センサーで物体の方向や速さが検知できませんでした。
さて、普通フォトリフレクタの検出距離は1〜2cmです。20cm以上の距離を検出するにはどうすればよいでしょう
2.赤外線LEDに大電流を流しスイッチする
答えは大電流を流す、最近の半導体は強くなっているので瞬間的に大電流を流しても壊れない事があります。ここでは赤外線LEDの電流制限抵抗無しで5Vを加え最大1.7Aの電流を流しています。動画では見にくいですが反射光から3,4Vの電圧が発生しこれをADコンバーターで読んでいます。これが20cm以上を検出する技術の核心です。時間は10uS(マイクロ秒)コレを守らないと赤外線LEDから煙が出て壊れます。
一見危険そうですが1年以上連続動作させて壊れないこと、赤外線LEDが劣化しないことを確認しています。昭和のデバイスでは無理だったと思いますが半導体の進歩によって可能になりました。
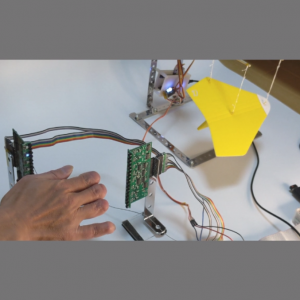
ソフトウェアセンシング
マイクロコントローラは反射光の強さを読み、それに応じた色でカラーLEDを発光させています。動画のキューブ型64個のセンサーで約7mS(ミリ秒)反射光は12ビット、約1mVの精度です。各センサーの反射光の時間変化は動画のように3次元グラフアニメーションのようです。これをソフトウェアで分析すると上空の状態が分かり、物体の動く速度や方向を検知出来ます。
詳細はユーザーマニュアルをダウンロードして下さい。このテクノロジーは公開しているのでご自由にお使いいただけますが、発売中のセンサー以外で自作などされる場合は動作保証できないので十分注意して下さい。
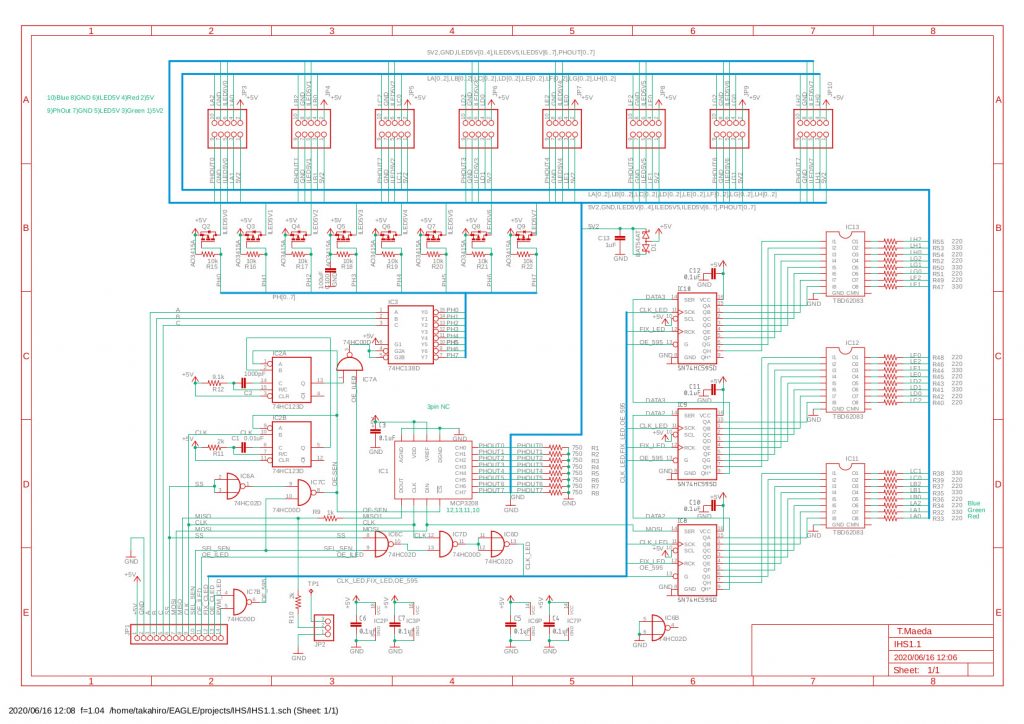
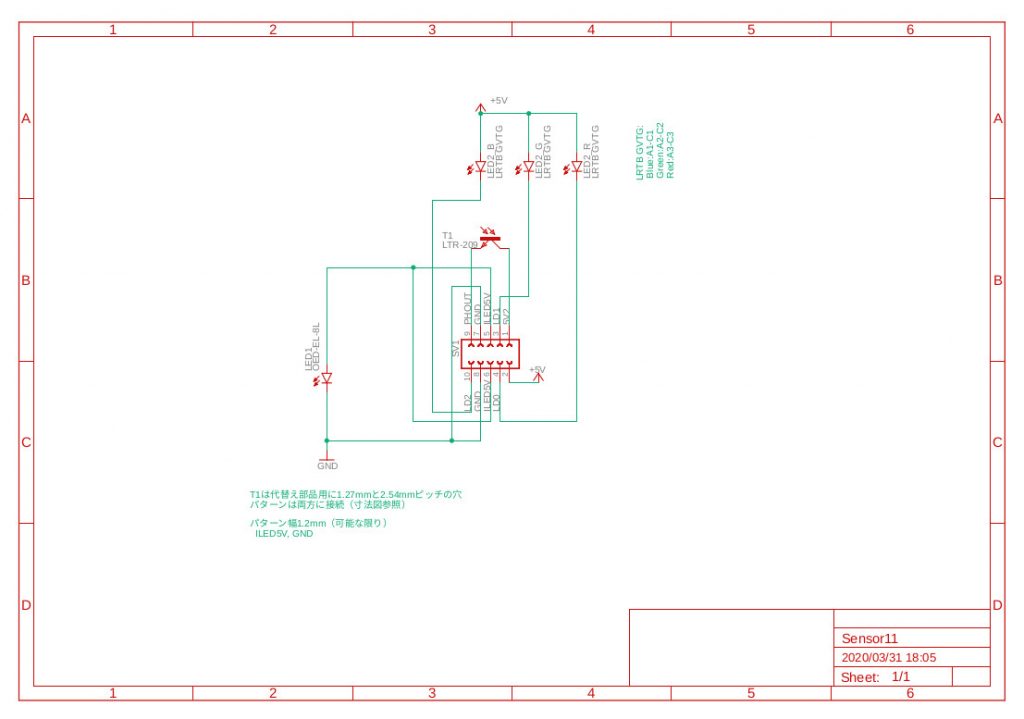
回路図
説明無しですが、本体基板とセンサー基板の回路図です。詳細はユーザーマニュアルをダウンロードして下さい。